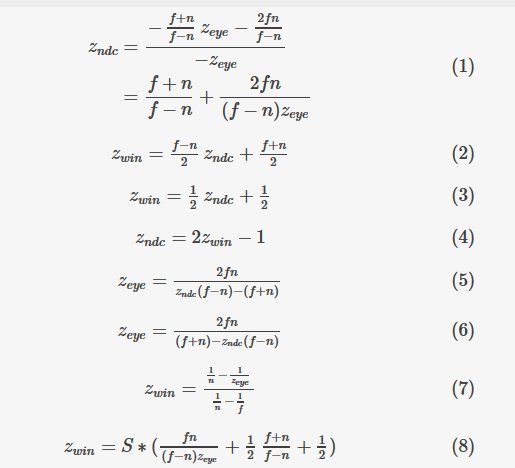
So, I'd like to know the mathematical description of it, specifically the equations of linearization and non-linearization of z-value.
While finding some tips and articles on the internet, I found a good description of it on the learnopengl.com comments.
https://learnopengl.com/Advanced-OpenGL/Depth-testing
Among many comments, the comment which 'wang dingqiao' wrote is so good for the understanding of this topic.
Therefore, for the record of it, I just wanna copy the comment, because the description is perfect.

댓글 없음:
댓글 쓰기